Historique :
L’essai de traction constitue l’essai mécanique le plus classique et le mieux étudié, il consiste à exercer sur une éprouvette, une force croissante ou une déformation constante qui va la déformer progressivement et la rompre.
C’est Léonard de Vinci dans les années 1500 qui aborde la notion de résistance des matériaux et en 1729, la première machine de traction est construite en Hollande.
Le début du 19eme siècle et l’essor de l’acier contribue à la fabrication de machines plus sophistiquées: La machine de Riehlé en 1906 (25 T) et la machine horizontale de Buckton en 1914 (100 T).
Les premiers extensomètres « modernes » basés sur une mesure optique apparaissent en 1920.
La première machine dite de « recherche » de 50 T apparait en 1947: « Denison machine » pour des essais sur des turbines à Gaz pour la construction navale, elle dispose déjà d’extensomètre à jauges de contrainte.
La marque Tinius Olsen apparaît en 1880, Galdabini en 1890, Denison Hydraulics en 1900, Roell & Korthaus apparait en 1920, ZWICK en 1937 et INSTRON en 1946 (liste non exhaustive).
Étude des caractéristiques classiques :
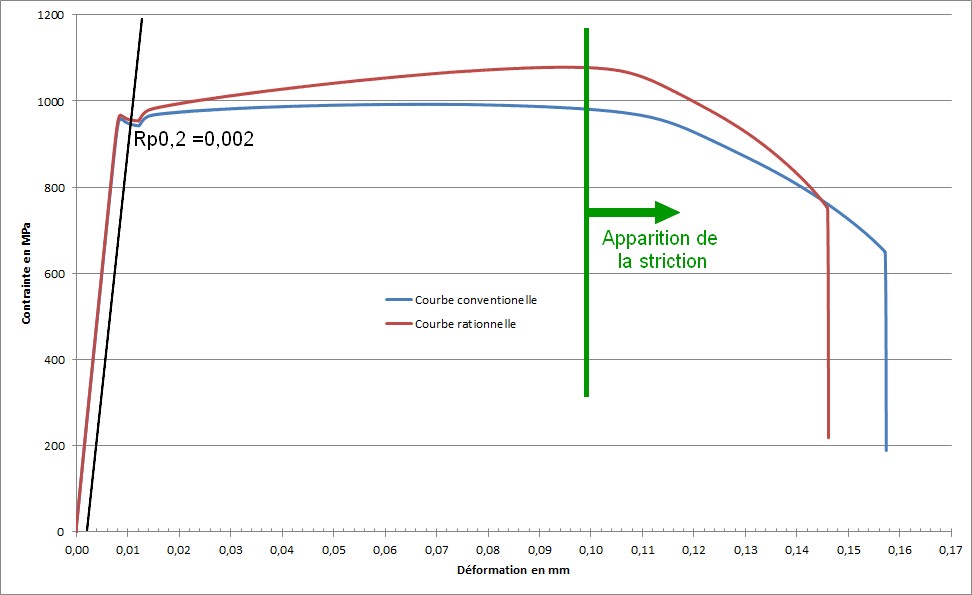
Sur un diagramme Contrainte-Déformation, on observe les phases successives suivantes comme le montre la figure ci-dessous: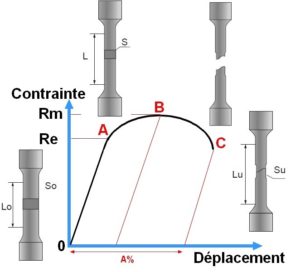
Entre l’origine et le point A: une phase élastique où la déformation est réversible.
Le point A est la limite d’élasticité apparente (en général, on détermine la limite d’élasticité conventionnelle à 0,2 % de déformation de Lo).
De A à B: une déformation permanente homogène appelée aussi déformation plastique répartie.
Le point B correspond à la charge maximale et correspond à la résistance mécanique du matériau.
De B à C: la déformation plastique se localise dans une portion de l’éprouvette et n’est plus homogène, c’est la striction et on aboutit à la rupture en C.
L’abscisse représente l’allongement ΔL de l’éprouvette sur la longueur calibrée (déterminée sur le Lo pour le calcul de l’allongement).
En ordonnée, la contrainte (c’est à dire le quotient de la force unitaire par le section initiale de l’éprouvette: So).
Allongement:
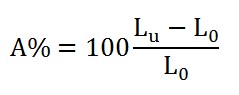
Lu représente la longueur de Lo après rupture.
Cet allongement est la somme de l’allongement réparti Ar jusqu’au maximum de la charge et de l’allongement localisé de striction Az:
![]()
La striction est la réduction de la section maximale de l’éprouvette rompue (section de rupture):
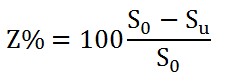
So: section initiale et Su: Section après rupture.
Cette déformation est également la somme de la déformation homogène répartie et de la déformation de striction proprement dite.
Loi de HOOKE:
Dans la première partie rectiligne de la courbe, il y a proportionnalité entre la contrainte et la déformation (au moins en première approximation), c’est la loi de HOOKE, la caractéristique est la pente de cette droite qui est le module d’élasticité.
L’essai de traction n’est pas assez précis en général pour la mesure du module d’élasticité car même si l’on amplifie suffisamment, de petites déformations parasites diminuent la valeur de la pente en plus des écarts à la loi de proportionnalité.
Ces écarts sont attribués à des micro-déformations plastiques pour les aciers doux et à des contraintes résiduelles pour certains aciers traités qui conduisent à une plastification progressive de l’éprouvette.
Rappel des définitions des constantes élastiques et leurs relations:
E désigne le module de Young (∼ 190 GPa pour l’acier) et il exprime le rapport de proportionnalité entre la charge/contrainte et la déformation longitudinale de l’éprouvette.
Le module de Young se détermine avec la formule suivante:
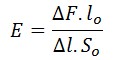 ΔF représente la différence entre deux points de force pris sur la droite dans la phase élastique, Δl représente la différence des déformations correspondant aux deux points de force.
ΔF représente la différence entre deux points de force pris sur la droite dans la phase élastique, Δl représente la différence des déformations correspondant aux deux points de force.
ν désigne le coefficient de poisson (∼ 0,30 pour l’acier), il n’a pas d’unité et exprime le rapport des déformations longitudinales et transversales.
G est le module de cisaillement ou de rigidité également appelé module de Coulomb (∼ 81 GPa pour l’acier).
Il existe une relation entre ces 3 paramètres:
Le comportement des alliages est différent sous un effort de traction selon leur structure (voir exemple ci-dessous entre un alliage de titane TA6V recuit et un alliage de Cobalt-Chrome).
Alliage de Titane recuit Cobalt-Chrome
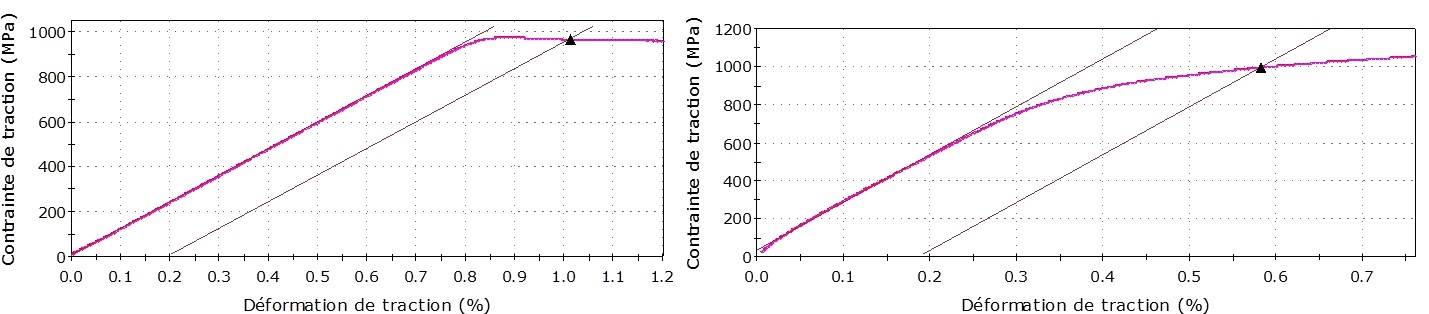
La structure cristalline de alliages de Titane TA6V est majoritairement hexagonale Compact alors que celle de l’alliage de Cobalt-Chrome est Cubique à face centrée.
Pour un même métal, la courbe de traction varie suivant l’histoire de celui-ci, elle dépend en particulier de la pureté du métal, de la dimension des grains, la limite élastique est très sensible à tous ces paramètres, la pente de la courbe rationnelle dσ/dε est appelée taux de consolidation, il mesure l’aptitude au « durcissement par écrouissage ».
L’alliage de Titane présente un seuil d’écoulement (palier avec une déformation rapide sans augmentation de charge), phénomène lié principalement au traitement de recuit de l’alliage (absence de contraintes résiduelles).
De plus, la vitesse de traction des deux courbes ci-dessus est pilotée en vitesse de déformation (pilotée par l’extensomètre sur la base du Lo soit 25 mm).
La théorie des dislocations nous permet de prévoir quelques données essentielles de la déformation plastique:
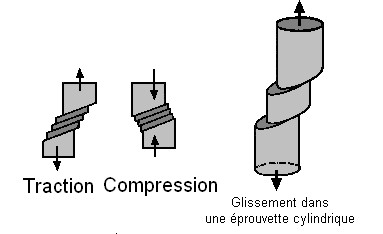
Si on soumet un monocristal à un essai de traction, on observe diverses familles de plans de glissement possibles pour les dislocations, les plan 〈111〉 par exemple dans une structure CFC (cubique à face centrée).
Dès que l’effort de traction est assez fort, la contrainte de cisaillement dans une famille de plan de glissement 〈111〉 par exemple est suffisante pour que les dislocations se déplacent et se multiplient.
On observe donc un glissement des tranches parallèles du cristal les unes par rapport aux autres, ce phénomène se manifeste par des marches sur toute surface non parallèle à la direction de glissement, ce sont les lignes de glissement.
L’explication phénoménologique généralement admise est la suivante: la machine de traction impose à l’éprouvette une vitesse de déformation Vt constante, or la vitesse de déformation d’un cristal contenant une densité de dislocations mobiles s’écrit:
![]()
ou Vσ est la vitesse des dislocations pour la contrainte appliquée.
Si la densité initiale de dislocations Q est faible, il faut atteindre des contraintes élevées pour que la vitesse des dislocations vérifie la relation ci-dessus.
b est le vecteur de Burgers
De plus, la micro déformation, à partir de la limite micro-élastique, introduit de nouvelles dislocations et la densité Q peut devenir tellement élevée que pour respecter la condition Vt=Cte imposée par la machine, Vt doit diminuer, ce qui entraine une chute de la contrainte.
Il s’ensuit que le seuil d’écoulement ne sera possible que si la densité initiale de dislocations est faible.
Limite élastique conventionnelle: Rp0,2
Le passage entre le domaine de déformation élastique et plastique représenté par le point A est souvent difficile à mettre en évidence sur les courbes effort-allongement, on est donc amené à définir une limite élastique dite à 0,2% dont le point figuratif correspond à l’intersection de la courbe de traction avec la droite parallèle à la courbe de déformation élastique et dont l’abscisse à l’origine est 0,2 % de Lo (soit 0,05 mm pour un Lo = 25 mm).
Limite élastique et taille de grain: on observe expérimentalement que la relation limite d’élasticité – Taille de grain peut se mettre sous la forme d’une relation (Loi de PETCH).
![]()
σo est la limite d’élasticité inférieure (la plus basse)
k est une constante en N/mm2 et d est le diamètre moyen des grain
Résistance à la traction:
Elle est définie par l’effort correspondant au point B, rapporté à la section de l’éprouvette, elle s’exprime en MPa (N/mm2).
Courbes rationnelles de traction:
Les courbes conventionnelles de traction ne prennent pas en compte, dans l’évaluation de la contrainte, de la diminution de la section de l’éprouvette au cours de la traction.
Il est donc intéressant de déterminer à chaque instant la contrainte vraie σv correspondant à un allongement Δl.
Pour cela, il faut connaître la section vraie S de l’éprouvette, on peut supposer en première approximation que le volume du métal se conserve pendant la déformation plastique.
Solo= Sl
avec So et lo = Section et longueur initiale
S et l = Section et longueur après allongement
σv est défini par la relation:
Or nous avons vu précédemment que la contrainte s’exprimait par:
et que l’allongement:
On en déduit donc que la contrainte vraie est donnée par la relation:
![]()
Lorsque l’éprouvette a obtenue la longueur l, l’augmentation de l’allongement Δl n’est pas Δl /lo mais Δl /l, la déformation vraie à l’allongement l est donc:
 Le tracé des courbes rationnelles peut être obtenu à partir des courbes conventionnelles en utilisant les relations précédentes, si l’allongement est uniforme (ce qui n’est pas le cas lorsque la striction apparait après le dépassement de la contrainte maximale).
Le tracé des courbes rationnelles peut être obtenu à partir des courbes conventionnelles en utilisant les relations précédentes, si l’allongement est uniforme (ce qui n’est pas le cas lorsque la striction apparait après le dépassement de la contrainte maximale).
On peut utiliser la relation de Bridgmann pour corriger l’effet de la striction sur la courbe rationnelle:
Avec R = rayon de courbure de la zone de striction et a = rayon du diamètre minimal
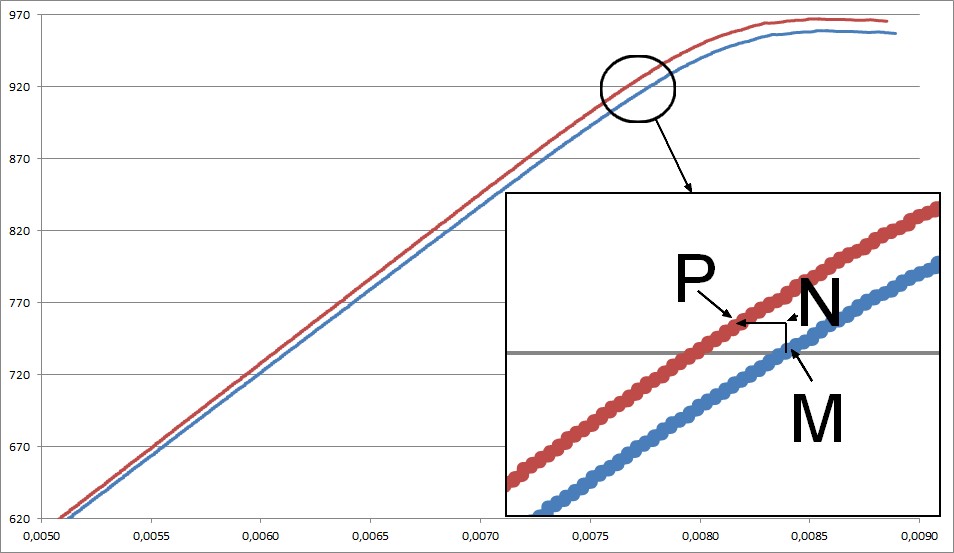
Etant donné un point M de la courbe conventionnelle, on apporte la correction due à réduction de section en traçant le segment vertical MN égal à:
La correction de l’allongement qui tient compte du fait que cette grandeur doit être rapportée à la longueur de l’éprouvette correspondant au point M est :
![]() On obtient le point P de la courbe rationnelle en traçant le segment horizontal NP égal à A-ε:
On obtient le point P de la courbe rationnelle en traçant le segment horizontal NP égal à A-ε:
Les courbes rationnelles sont moins arrondies que les courbes conventionnelles et se placent au dessus de celles-ci.
Elles permettent de définir une limite élastique qui est la même que celle obtenue avec les courbes conventionnelles et une charge maximale.
Leur utilisation est indispensable pour l’étude fine des phénomènes qui interviennent pendant la déformation plastique tels que le coefficient d’anisotropie r et d’écrouissage n.
En effet, la portion de l’allure parabolique de la courbe rationnelle peut être mise sous forme d’une relation mathématique, l’expression la plus utilisée est donnée par (Loi de Ludwik):
![]()
avec σo= limite élastique apparente (considérée comme nulle pour les aciers doux) et K et n étant des constantes.
n est appelé coefficient d’écrouissage.
Ce coefficient d’écrouissage est égal à l’allongement réparti de l’éprouvette qui est difficilement mesurable.
La méthode la plus facile pour sa détermination est de transformer les axes de la courbe rationnelle en coordonnées logarithmiques, l’équation de Ludwik s’écrit alors:
![]()
Nous avons donc une droite de type y = ax+b avec a = n (pente de la droite) et b = log σo + log K